
前回に引き続き、JC東京3Dを終えての自分なりの反省会です 笑
今回、4週目のDBでコースアウトしてしまった原因は、直前まで悩んでいたマシンのリヤバンパーだと思っています。
…むしろそれしかありません!笑
結果的に、大会前から不安要素のあったアンカーをチョイス…

もちろんアンカーというものが悪いのではないです。
試走をしながらの調整をする機会もなく、実戦投入してしまった僕のアンカーの精度が原因 笑
最終的にリヤをアンカーにしたのも、せっかく東京3Dを見越して作ったのだからという理由だけ 笑
大会直前まで自分の中で懸念していたアンカーでのジャンプ時の姿勢…
色々なコースで走らせながら気になっていた部分でした。
JCでは、スタート台から目の前がDBだったので、マシンが帰ってくるたびにジャンプ姿勢を確認出来ていました。
1位を走っている時の不安と、ジャンプするたびの不安を覚えています 笑
そして4週目でのジャンプからの着地…
こんな感じで着地してました…
目の前だったのではっきりと見ていました 笑
やはり3週はちゃんと飛べていても分からないものですね…
今回はDBでの飛距離が出すぎた感じもなかったので、やはりジャンプの
姿勢だったんだと思います。
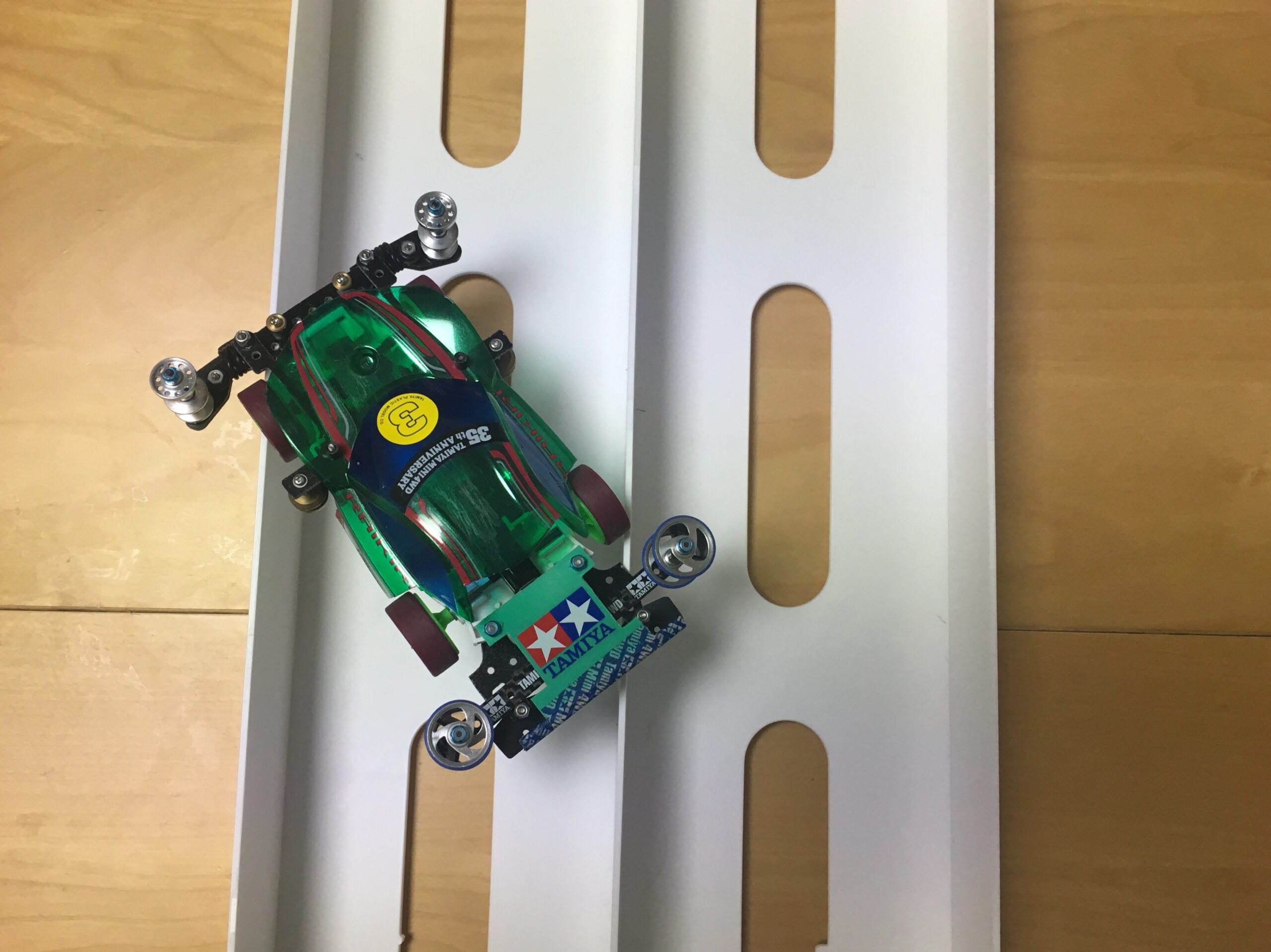
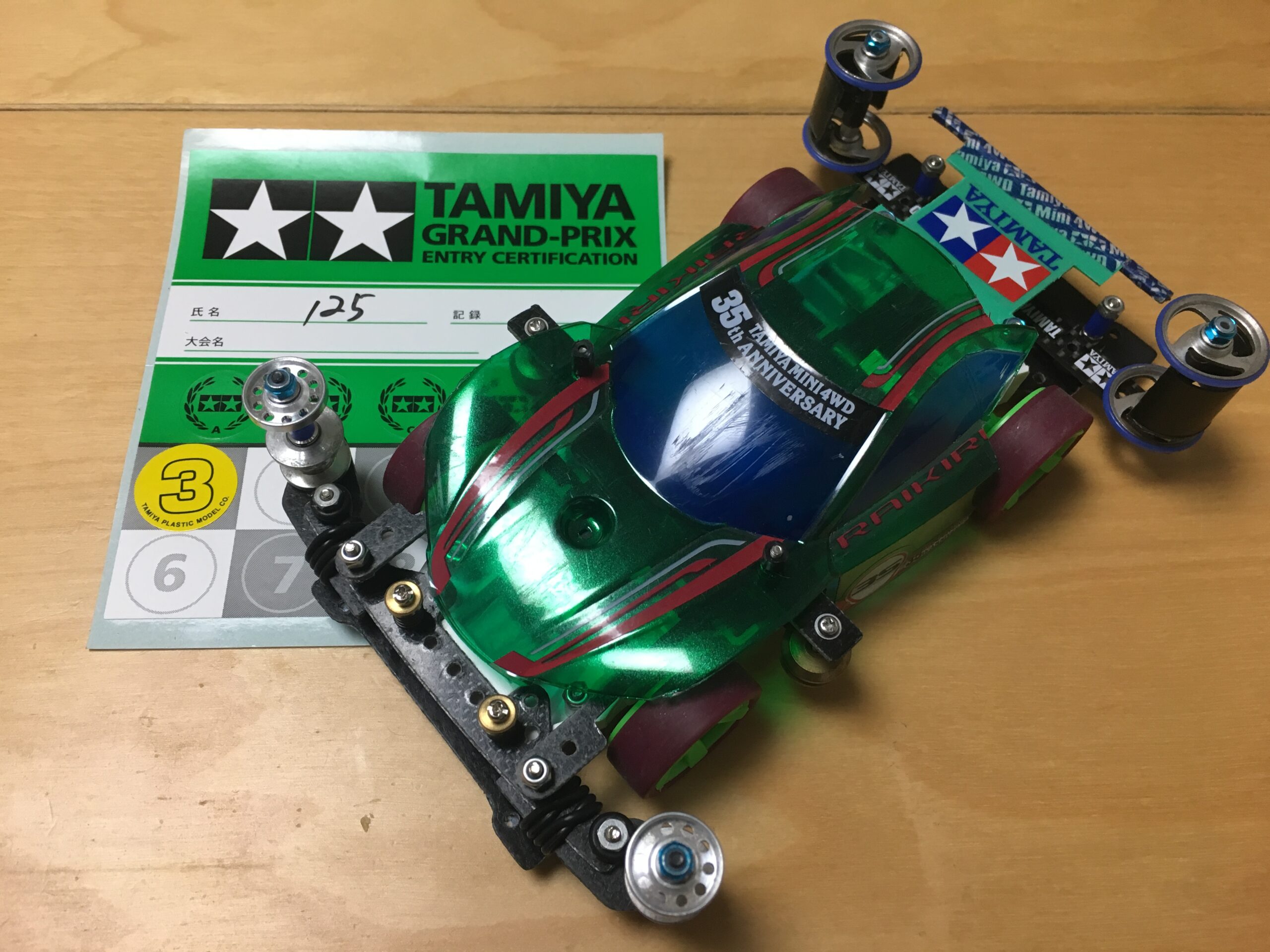
最終的なマシンの仕様はこうなりました。

HDモーターで、3.7:1のギヤ比。
前後ローフリクションのローハイトタイヤ、リヤのアンカーにはホイールスタビも付けてみました。
収穫もあれば、反省点もあり…
またミニ四駆について学ばせてもらいました。
これらを糧に、またマシンいじりをしていきたいと思います 笑

コメント